

Welcome to Part 3 of RaveRobot’s Voron 2.4 build diary. In this post we will discuss assembly of the Z-motion system.
Intro
In my previous post I completed our frame assembly and left it to sit overnight to ensure the threadlocker on the frame bolts had time to fully set. Now it is time to embark on building the vertical (Z-axis) motion system. The linear rails were already installed as part of the frame assembly so I’m going to jump right into the gear boxes for the motors. If you bought a motion system kit you are going to need a lot of the components from that now.
Materials and Preparation
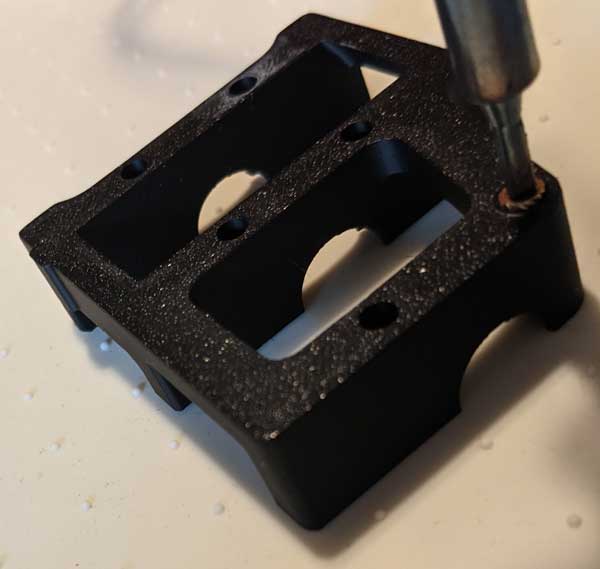
There are a number of printed parts here that need heat set inserts added. I found it’s best to just tear through them in sections, so I did all the ones that I was going to need for this section up front. Heat sets are not hard to do, just get a soldering iron and a short tip you don’t care about or a heatset tool.

Set the insert in the hole then hold the iron to it until it slowly melts into the part, very light pressure here, don’t force it. I took a metal scraper and then pressed it down over the part to make sure everything was flush while the insert and plastic were still a little hot. For any parts that have a complete pass through you may need to clean some extra material out of the inside of the insert. Everything needs to be perfectly aligned here, so take your time and make sure that the insert is going in straight.



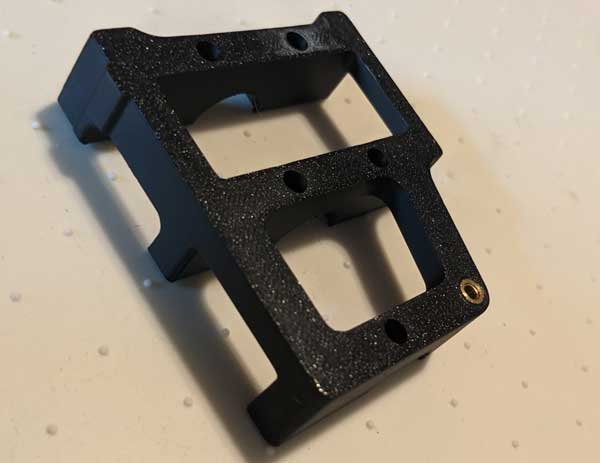
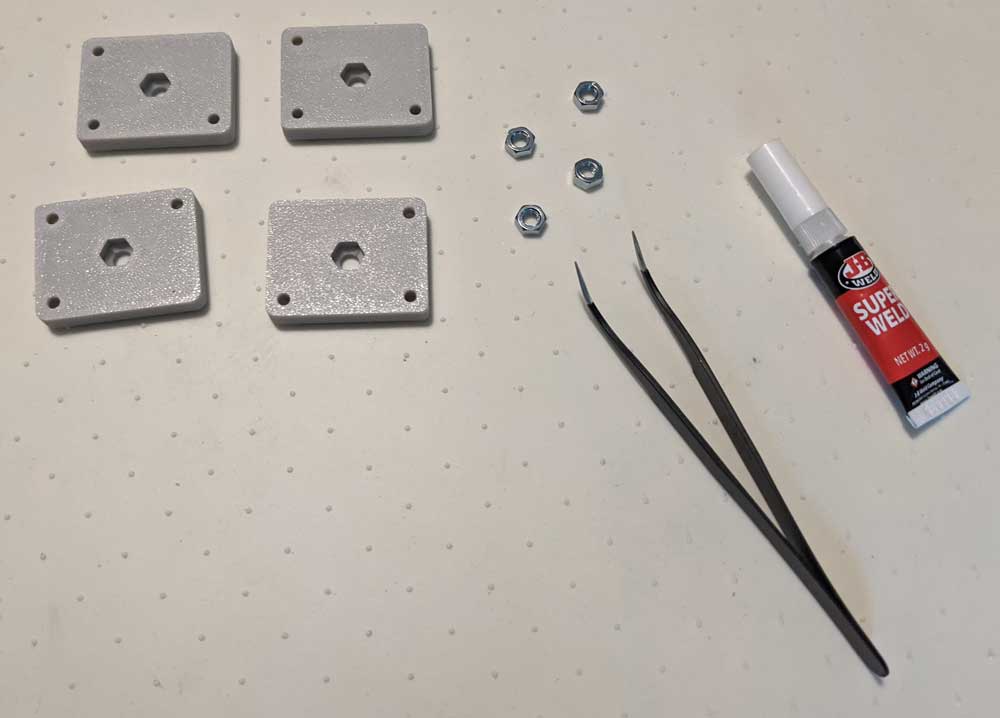
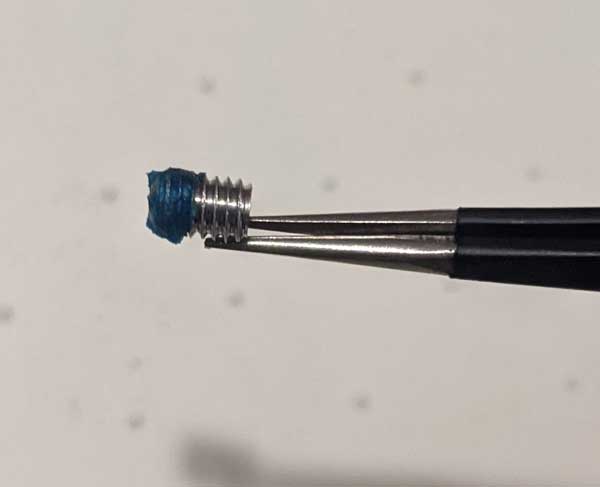
In addition to heat sets there are some accent parts which hold a 5mm nut which will eventually connect the feet to the printer. It is advisable here that you superglue the nuts to the plastic so you aren’t messing around with the nuts falling out during assembly so go ahead and glue those in now. You only need a small amount of glue as the goal is just to keep the nut from slipping out as you flip parts around.

The final bit of prep here is to take a file and just quickly run it over the surfaces of any parts that are going to mate together in case there are any surface defects. If you are printing parts with Z-hop on your retractions/travels then sometimes the top layer will get some little bits poking up. It is best to just file those down to be flush but please do not try and sand these parts down or change their geometry in any way.

Building the Gearboxes
Once all my inserts were done it was time to start actually assembling the gear boxes. For a lot of the Voron build you are going to see that you do multiple smaller assemblies and then attach them to the printer or each other. This break down of a lot of complex parts into smaller easier to manage assemblies really does make the build easier. Pay attention to the images in the manual as not all of them have clear marks on them for orientation so sometimes there are subtle differences you need to keep track of.
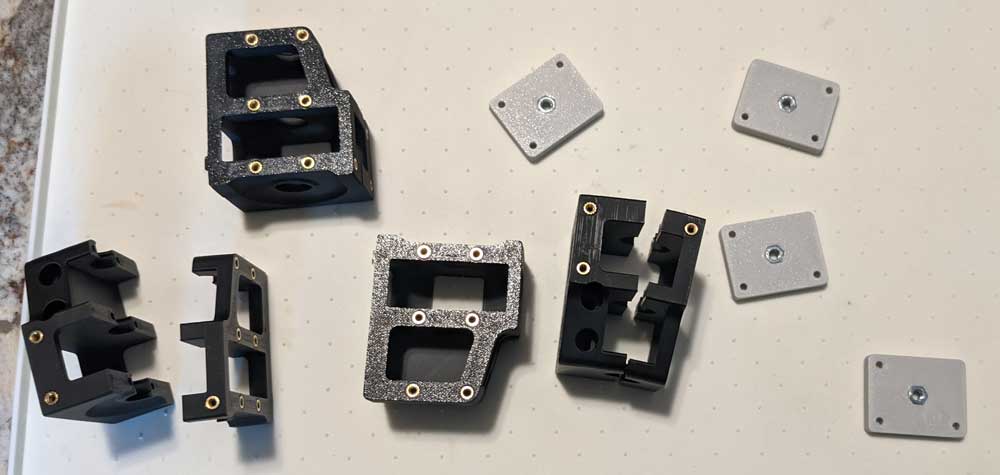
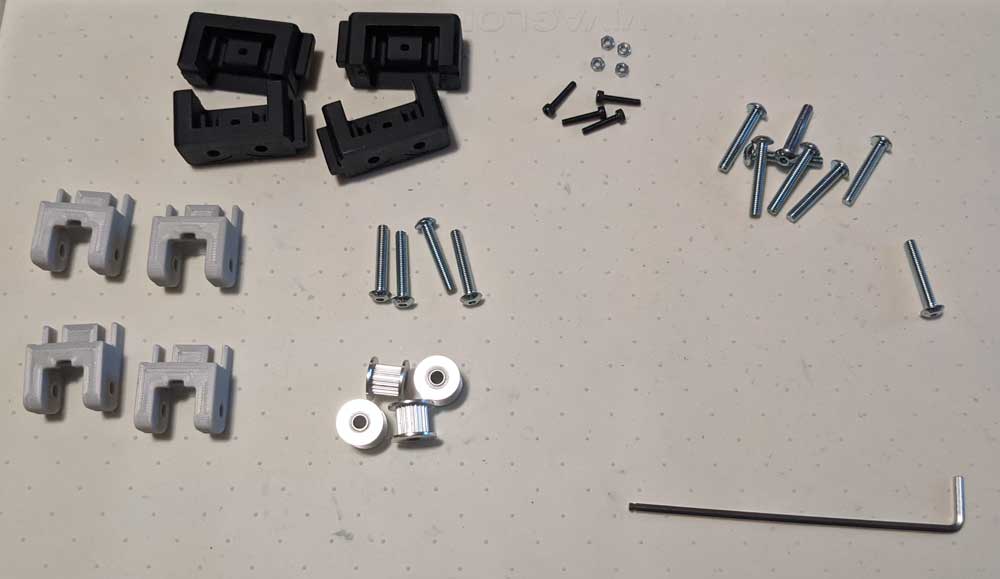
Now it is time to assemble the gear boxes. For each gearbox in addition to the printed housing you are going to need a pin with a flat face, three 625 bearings, one 20 toothed 9mm pulley, four M5 shims, one large 80 toothed pulley, and a closed GT2 belt. Loosen the grub screws in the pulleys (we’ll tighten them and locktite them later). The assembly is pretty straightforward with a bearing, the big pulley, two shims, another bearing, the last two shims, the small pulley, and then the final bearing. These should all sit nicely in the printed housing and it should spin fairly easily.



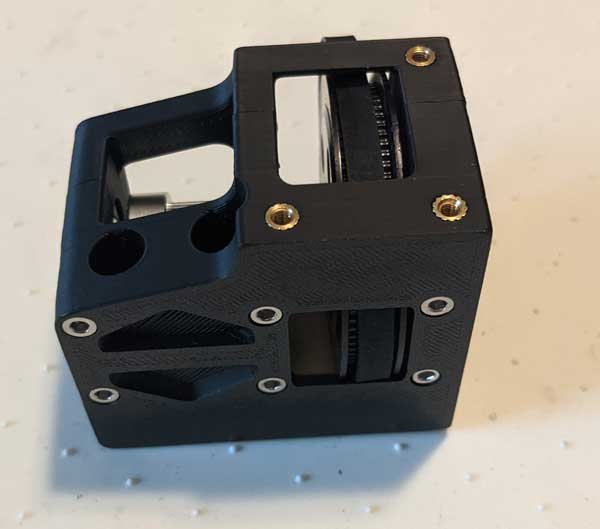




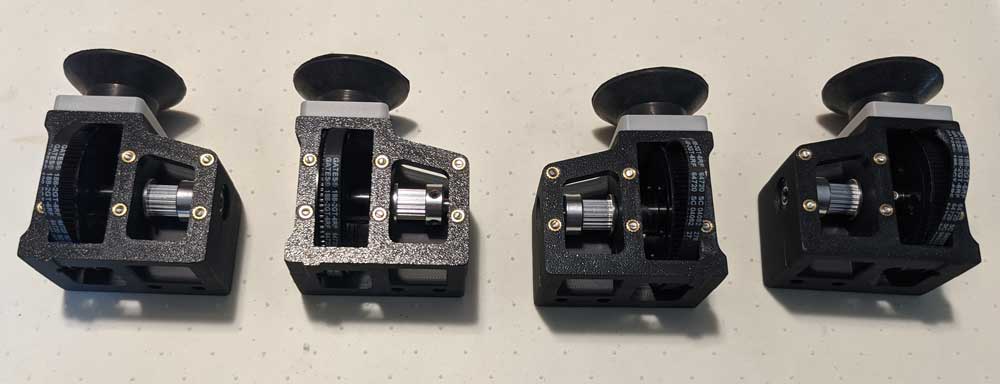
Make sure the top fits and if everything looks good then loop one of the belts over the big pulley and then it is time to close up the assembly with six M3x40mm bolts. The accent part that we glued the nut into goes under the big pulley and attaches with three M3x8mm bolts as well. Finally we can take one of the compression feet and attach that to the accent part with an M5x10mm bolt. Now repeat this three more times until you have all four gear boxes.
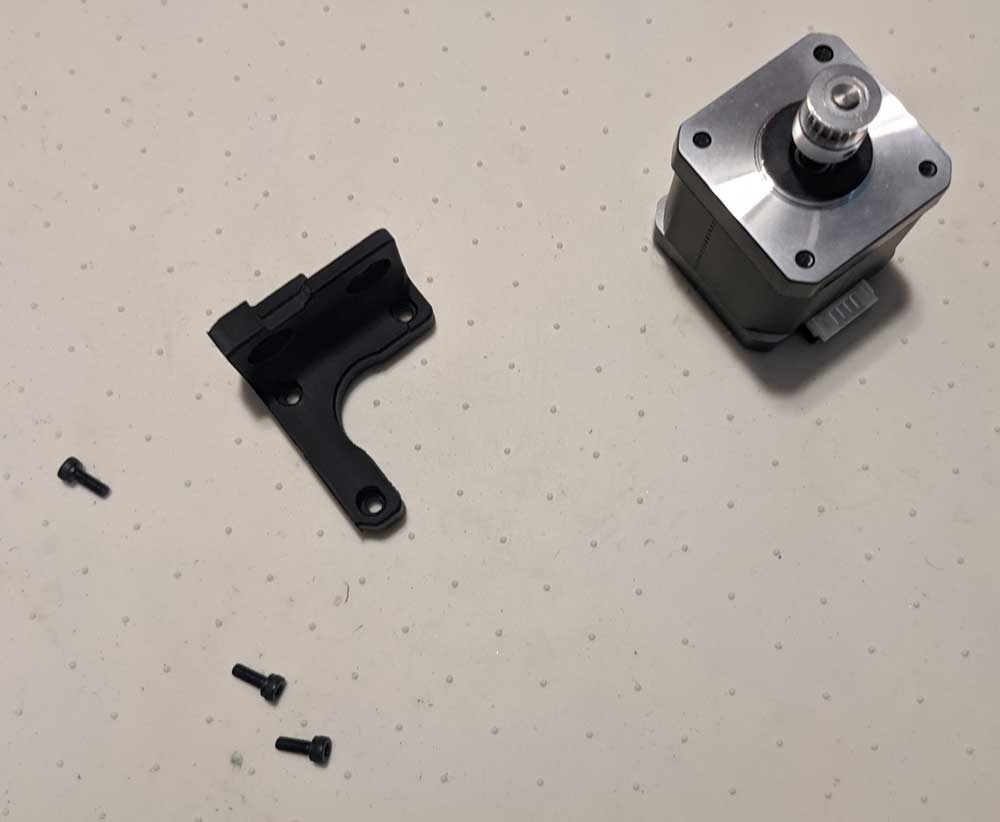
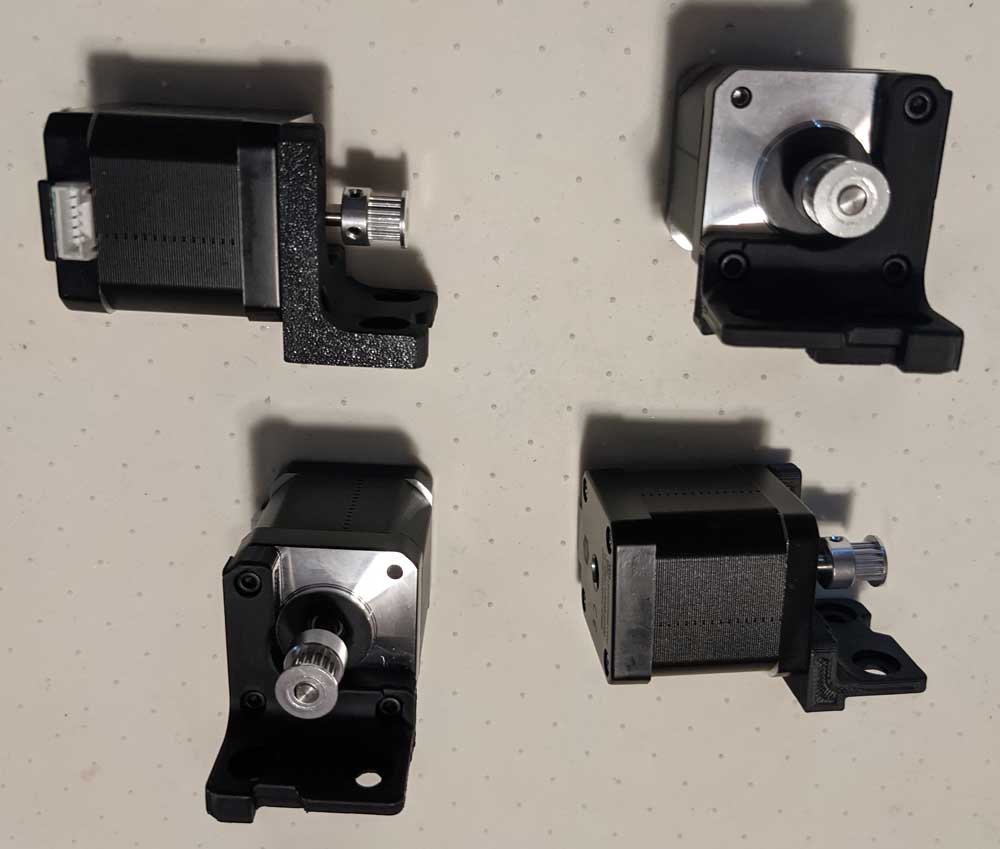
The next step is the Z-motors. Each motor needs a pulley added to them (loose fit for now, locktite later). The printed bracket attaches with three M3x8mm bolts. You’ll want to think about how these mount to the bottom of the frame and which direction you want the wires to come out from the motors. In general the easiest thing is to have the wires come out into the electronics cabinet.
Attaching the Z Motors and Gearboxes
Attaching the motors and gear boxes to the frame will require four M5 roll in T-nuts set into the frame. I added all my T-nuts ahead of time and I found that there were some manufacturing inconsistencies and not all of them liked to roll in nicely. I tried to add as many as I could ahead of time and then kept the nicest ones that had good tolerances for when I inevitably discovered later that I forgot one.


The gearbox mounts to two of these T-nuts with M5x40mm bolts and the motor bracket to the other two at the same corner with M5x10mm bolts. Make sure to add the accent colored tensioner arm under the motor bracket and to loop the belt over the motor pulley before bolting it down all down. Now is a good time to line up the large gearbox pulley and the small motor pulley and once they are aligned apply locktite and tighten them down.
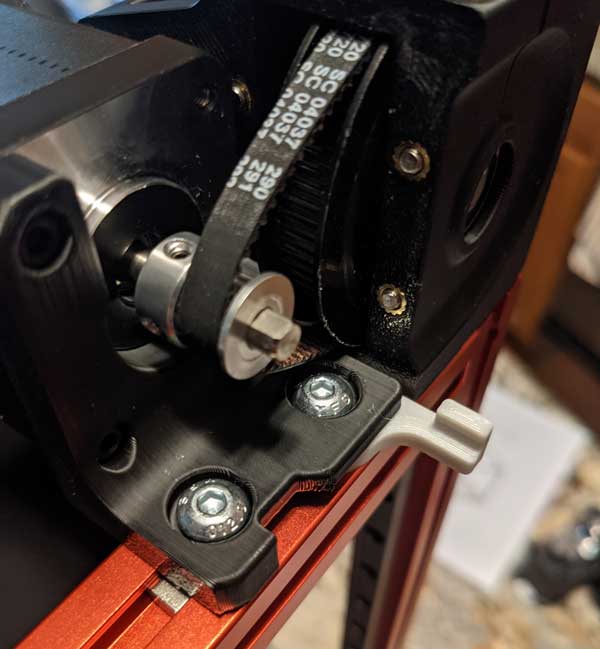
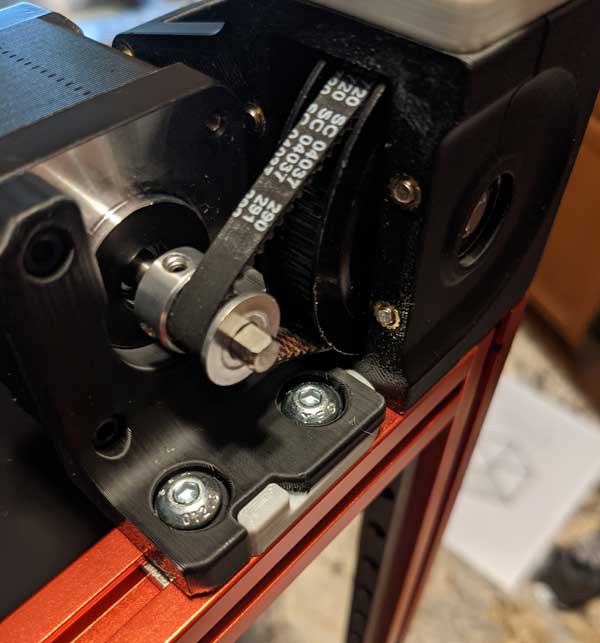
Flip the tensioner and your belt should be properly tensioned between the gearbox and the motor. If everything is looking good then it’s time to repeat this three more times until all four gearboxes are attached. Next up the Z idlers at the top of the frame.
Attaching the Z Idlers
The four Z Idlers we need the two printed parts (one is accent color), four M3 nuts, four M3x16mm bolts, four 20T 9mm idlers, and twelve M5x30mm bolts. The M3 nut needs to be set in the idler housing and again a dab of superglue will help you a lot here. The accented idler part should slot into the housing easily, pay attention to orientation here, and once aligned you can loosely attach it with an M3 bolt up through the M3 nut.



An M4 bolt is used to hold the idler into the accent bracket and the part is designed that you cut the threads into the plastic when you screw it together. Go carefully here and don’t hulk down on it. Once all four idlers are done you attach them to the frame with M5 T-nuts and the remaining M5x30 bolts, using the indexing tab to align it with the perpendicular frame extrusion.



That’s it, the Z motion system (excluding belts) is done and this wouldn’t be a bad stopping point for the day. In the next part I’ll be building the floating gantry which will ride on the four Z-belts and hold the afterburner tool head.


Voron Build Diary Guide
- 1 – Sourcing Your Parts
- 2 – Building the Frame
- 3 – Assembling the Z-Motion System
- 4 – Assembly and Installation of the X/Y Gantry
- 5 – The Afterburner Direct Drive Extruder
- 6 – Wiring and Electronics
- 7 – Klipper Firmware Installation and Test Flight
- 8 – Printer Tuning and Finishing Touches (Coming Soon)


